VIII класс
Программа по физике VIII класса позволяет развить представления учащихся об автоматическом контроле. Поскольку понятия об автоматическом устройстве контроля и его составных элементах уже рассматривались на первой ступени обучения физике, то особое внимание следует обратить на ознакомление с конкретными устройствами контроля механических величин.
Для того чтобы не загружать память школьников и развивать их мышление, целесообразно использовать такие примеры и методы, которые бы стимулировали самостоятельную работу учащихся.
В соответствующих местах курса можно, например, предложить такие вопросы и задания: "Как измерить электрическим способом перемещение, ускорение, скорость вращения, силу? Придумайте устройство для измерения ускорения, перемещения, скорости вращения, силы. Объясните его работу. Изготовьте дома измерители ускорения и перемещения".
Рассматривая вопросы, связанные с автоматическим управлением, нужно показать, что по принципу управления все автоматы делятся на автоматы с программным управлением и с обратной связью. Здесь важно сформировать понятия прямой и обратной связи, показать, как обратная связь осуществляется с помощью устройств автоматического контроля.
Понятия об обратной связи и принципе управления с помощью обратной связи удобно рассмотреть в теме "Применение законов движения". Это можно сделать следующим образом.
Вначале учащимся предлагают решить в общем виде задачу: "Грузы, шарнирно укрепленные на стержнях длиной l, приводятся во вращение с угловой скоростью ω. На какой угол α отклоняются они при этом? Как изменится угол, если увеличить скорость вращения?"
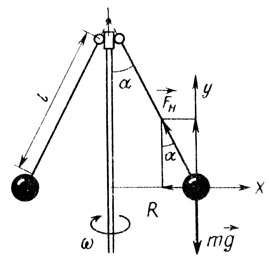
Рис. 29
Решение. На грузы действуют сила тяжести mg и сила натяжения Fн (рис. 29). Запишем для проекций этих сил на оси x и y второй закон Ньютона:


Учитывая соотношение
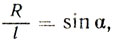
получаем:

Правильность полученного результата желательно подтвердить экспериментально.
Устройства, подобные рассмотренному в задаче, позволяют по отклонению грузов судить о скорости вращения, поэтому они часто используются как датчики. Впервые такое устройство было использовано Д. Уаттом для регулирования скорости вращения вала паровой машины.
При ознакомлении с работой регулятора Уатта важно обратить внимание учащихся на следующее свойство этого автомата. В нем имеет место не только управляющее воздействие на объект управления (прямая связь), но и сам объект управления оказывает воздействие на управляющее устройство (обратная связь). Поэтому такие устройства получили название автоматов с обратной связью (рис. 30). Принцип управления, при котором автоматическое устройство, получая информацию с помощью обратной связи, корректирует свое действие с учетом результатов управления, лежит в основе современного автоматизированного производства.
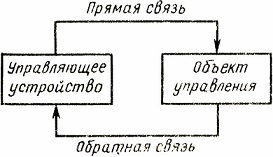
Рис. 30
Основными частями автоматов с обратной связью являются датчик информации, преобразователь информации, исполнительное устройство. Например, в регуляторе Уатта датчиком информации служат грузы. Они позволяют контролируемый параметр (скорость вращения) преобразовать в перемещение, что более удобно для дальнейшего использования. Роль преобразователя информации выполняет рычаг, исполнительным устройством является заслонка.
В электрических автоматах с обратной связью датчик, как правило, преобразует контролируемый параметр в электрический сигнал.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://physiclib.ru/ 'Библиотека по физике'